Nota: EM CONSTANTE PROCESSO DE DOCUMENTAÇÃO E DESENVOLVIMENTO

O meu Trabalho no Projecto Aprender com a Robótica
Desde já convém explicar os objectivos, do Projecto Aprender com a Robótica do Programa Ciência Viva, que tem como intenção primária ajudar alunos do Ensino Secundário a construir robôs com a possibilidade de os inscrever em concursos de robótica , sendo que o que é importante é que no decurso do trabalho se dê um processo de aprendizagem do mundo da robótica.
É preciso agora explicar que o que eu vou fazer no Projecto é auxiliar os alunos do Ensino Secundário: - dando o apoio necessário no esclarecimento de dúvidas ao nível da programação, que no caso do microcontrolador utilizado no Projecto é linguagem C; -procedendo à projecção de algumas partes do projecto (que nos foi pedido para remodular ou acrescentar) e montagem de todo o hardware utilizado.
Podemos assim dividir o Projecto em duas grandes partes: Software e Hardware. Na parte de Software incluo a programação em C do microcontrolador e a programação em Visual Basic . Na parte de Hardware incluo todos os componentes do robô .
Concursos de Robótica
Nesta secção faço uma listagem dos diversos concursos de Robótica Passados e Futuros (listagem construída com base em informação da página de Emmanuel Lomba ):
Robot
EM PROCESSO DE DOCUMENTAÇÂO E DESENVOLVIMENTO
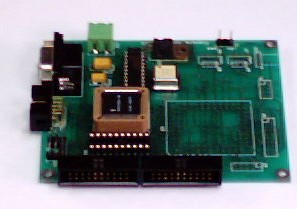
Placa Central
A placa central vai funcionar como o "cerébro" do robô, centralizando o controlo de todos os componentes e alojando o programa que vai tomar as decisões em relação a várias situações.
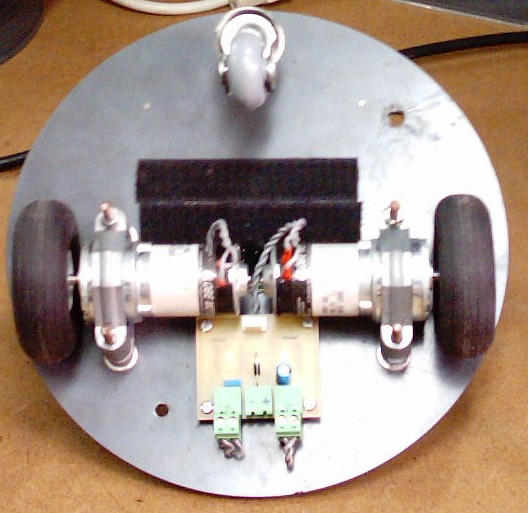
Controlo do Motor
Para o controlo da velocidade e direcção dos motores vamos utilizar duas pontes H.
Detecção da Linha
Para fazer a detecção da linha vamos utilizar infravermelhos.
Detecção de Obstáculos
Para detectar obstáculos vamos utilizar sonares para obstáculos a mais de 50cm e infravermelhos para obstáculos a menos de 50cm.
Detecção da Parede
Para detectar a parede vamos utilizar um sonar.
Controlo do PWM do Motor
Para permitir que o robô suba uma rampa necessitamos de monotorizar a velocidade do motor de modo que se for necessário um incremento da velocidade do motor quando o robô está a subir a rampa seja possível faze-lo.
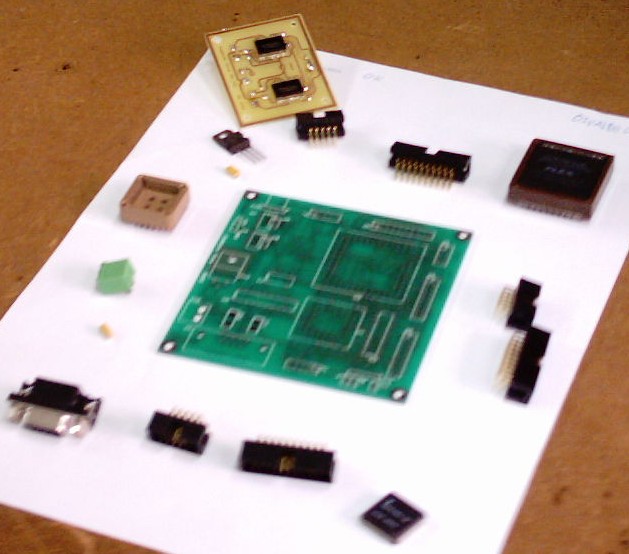
* Placa Central
|
| Componentes utilizados: |
| 1 |
T89C51RD2 |
| 1 |
7805 |
| 1 |
Max233 |
| 1 |
Cristal 20Mhz |
| ... |
... |
| Componentes opcionais: |
| 1 |
FPGA |
| 1 |
Pal |
| |
|
|
A placa central vai funcionar como o "cerébro" do robô, centralizando o controlo de todos os componentes e alojando o programa que vai tomar as decisões em relação a várias situações.
...
* Controlo do Motor
|
|
| Componentes utilizados: |
| 2 |
Tpic |
| ... |
... |
|
Para o controlo da velocidade e direcção dos motores vamos utilizar duas pontes H.
* Detecção da Linha
|
| Componentes utilizados: |
| 7 |
Led's Receptores de Infravermelhos Sharp |
| 7 |
Led's Emissores de Infravermelhos |
| 1 |
Pic 18F84A |
| 1 |
Cristal 20Mhz |
| ... |
... |
| |
|
Para fazer a detecção da linha vamos utilizar infravermelhos.
* Detecção de Obstáculos
Para detectar obstáculos vamos utilizar sonares para obstáculos a mais de 50cm e infravermelhos para obstáculos a menos de 50cm.
* Detecção da Parede
Para detectar a parede vamos utilizar um sonar.
* Controlo do PWM do Motor
Para permitir que o robô suba uma rampa necessitamos de monotorizar a velocidade do motor de modo que se for necessário um incremento da velocidade do motor quando o robô está a subir a rampa seja possível faze-lo.
Programação do microcontrolador
Para programar o microcontrolador estão disponíveis os seguintes programas:
- Franklin Software ProView32 - Windows - Demo (programa não é Freeware
estando por este motivo sujeito a limitações da versão demo) é um compilador
de linguagem C para o microcontrolador que podemos utilizar (T89C51RD2 -
arquitectura 8051), este programa permite: converter o programa em liguagem
C em linguagem máquina gerando um ficheiro *.hex com o resultado da conversão;
e simular .
Nota: Depois de instalar para activar a geração do ficheiro *.hex ir a
Options->Project->L51->Linker e activar a opção Intel Hex como indica a figura 1.
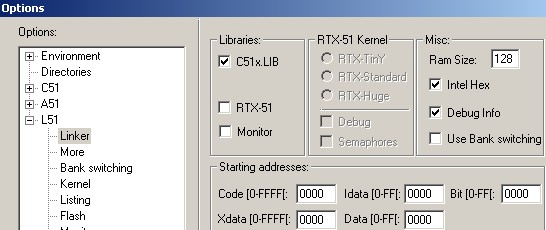
Figura 1
- FLIP - Windows e Linux - Freeware é um programa para enviar o ficheiro *.hex
para o microcontrolador.
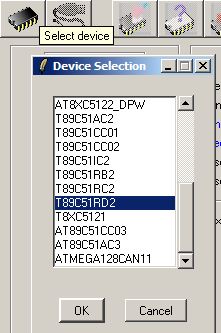
Figura 2
|
Como mostra a figura 2, o primeiro passo é
escolher o microcontrolador clicando no primeiro ícone e seleccionando a opção T89C51RD2 e clicando em OK. O segundo passo é escolher a porta de comunicação clicando no segundo ícone e configurar a porta de comunicação, como indica a figura 3, e clicando no botão Connect, se tudo estiver certo o programa segue em frente.O último passo é seleccionar o ficheiro *.hex que foi gerado pelo compilador e que se pretende carregar para o microcontrolador, como indica figura 4, e carregar no botão Run (como se pode ver na figura 5).

Figura 3
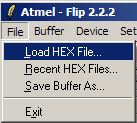
Figura 4
|
Projectos Pessoais